
Home
Cruise
Observatories
Operations
Student Projects
Gallery
Poetry
Ships at sea never sleep. Research expeditions on the academic fleet of large research vessels in the U.S., have a tradition of working around the clock, always conducting measurements, observations, surveys, sampling operations, or a host of other demanding activities like testing and using innovative next-generation systems like the robotic, free-swimming underwater vehicle Sentry. Successor to a vehicle known as ABE (Autonomous Benthic Explorer), Sentry is one of the remarkable contributions to the oceanographic community from Woods Hole Oceanographic Institution (WHOI). It is the brainchild of Dana Yoerger, Al Bradley, Al Duester, and their colleagues on Cape Cod.
"Flying" Above the Ocean Bottom
On this cruise, we are testing Sentry “under fire” (actually under water) for the first time in the demanding conditions of an actual fully focused research cruise. Sentry’s second major lowering took place during much of the day on a 17-hour “run” in a closely crafted and demanding survey of the actively venting methane deposit known as Hydrate Ridge. Dana had set the vehicle to “fly” at 75 meters above the bottom in lines that were 11 km long and 250 meters apart. As July 26 ended at midnight, Sentry was finishing the last 3 hours of this crucial survey to determine the safety of the regional cabled observatory node site. This node will serve scientists for decades in their studies of Hydrate Ridge and its environment.
The Power of the System
After performing flawlessly for more than 35 of the 55 km survey, Sentry’s internal navigation system lost its bearings and it began mapping unscheduled terraine. We recovered the AUV and the Sentry team—Dana, Al Duester, Andy Billings, James Kinsey, and Dan Gomez-Ibanez— began diagnosing what happened. A quick look at the data proved the power of this new mapping system. The first high-resolution maps of the large southern Hydrate Ridge carbonate pinnacles are “in the can” as Dana would say.
Primary Goals Accomplished
We also satisfied ourselves that once again Deb Kelley’s instinct about where to position the power and communications node for Hydrate Ridge, i.e.,well south of the venting action, is right on the money. So despite the late stage complexity of the AUV dive, two of the primary goals of the dive were accomplished. Dana and the team spent most of the rest of the day working methodically through the performance of Sentry and by midnight had solved the problems so that Sentry could be deployed again in its critical third time to define the broader spatial relationships of southern Hydrate Ridge for the many scientists who have been working in the area and who are planning novel experiments to be employed on the regional cabled system.
As we upload this description, Sentry is back on the seafloor mapping again at a depth of 800 to 1000 meters. The results will provide an unparalleled high-resolution bathymetric map for current and future planning.
Completing the Mapping of Hydrate Ridge
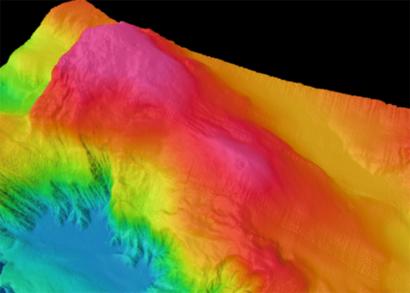
Shortly after Sentry was brought onboard, the focus of activity shifted to the EM300 group, led by Andrew Kennedy and Michael Reed and supported by Dax Soule and Joshua Hill. This 5-hour follow-on survey completed the mapping of Hydrate Ridge for comparison with earlier maps. The image on this page is a three dimensional rendering of the current map that will immediately be made available to Oregon State University researchers going to sea in early August for additional studies of the Hydrate Ridge site.
Launching TowCam
Immediately following the completion of the EM300 survey, Dan Fornari and Deb Kelley launched the TowCam to explore two sites: 1) the secondary node site, which is located to the south, proved gratifyingly boring—nearly flat surfaces and no faults or venting—a good place to install a node; and 2) the actively venting area at the northern end of the Sentry survey identified in years past by Hydrate Ridge researchers
There is a growing TowCam crew supporting Dan Fornari and Erich Horgan. The group now consists of Dax Soule, Min Lin, Jennie Mowatt, Jan Beckmann, and Cody Young. Because Fornari is soon leaving the cruise at our mid-cruise port call in Newport, Oregon, he and Erich are training up a crew to work chiefly with Erich after we move to Axial Seamount, hundreds of miles west of Hydrate Ridge, on Thursday, July 31st.
Climbing the Front
But the most exciting activity of the TowCam took place this afternoon when the expanded team took the challenge posed by Chief Scientist Deb Kelley’s dive scenario of starting
at the abyssal plain near Node 1 at 2880 meters water depth, and “climbing” the precipitous tectonic “front” where the edge of the continent is being added to (accreted) by compacted, compressed, and uplifted marine sediments to heights that stand as much as 2000 meters (6,000 feet) above the abyssal plain.
Using the magic of the Collaborative Oceanographic Visualization Environment (COVE) software package, designed by Keith Grochow, and the ability to render the recently mapped EM300 data, Deb Kelley produced a perspective rendering of the base of the continental slope and the path up the “wall” that TowCam navigated. In some cases it was only the sophistication of the sonar obstacle avoidance configuration that Fornari had designed into TowCam that saved the towed camera from smashing into the cliff and blinding its digital eye. Seattle’s Space Needle is shown with the cliff for perspective in the image on this page put together by Cody Young and the EM300 team.
A Bit of a Hybrid
Fornari insists that his TowCam is a bit a hybrid. He notes that for decades we marine geologists have used seafloor dredges dragged on the bottom to blindly collect any rocks unlucky enough to be in the way. He recalls the use of corers dropped at their in-water terminal velocity into the soft mud to recover samples of the upper strata of the seafloor. These he laughingly dismisses as “dopes on ropes.”
But begin talking with him about TowCam and he waxes eloquent about simplicity, efficiency, effectiveness, and adaptability. Lurking beneath his increasingly grizzled exterior after 5 days and 6 nights working at sea, is the hybrid soul of an engineer-artist-natural scientist-curmudgeon. He is a delight to sail with because he has the energy and intensity that must have driven Shackleton, Van Gogh, or Edison. Dan’s contribution to the oceanographic community over the past three decades have been legion.
Two Altimeters
For navigation, TowCam carries forward-looking and downward-looking altimeters that feed information up to operators on the ship via the cable that tethers the instrument to the vessel. Operators use these altimeters to “fly” TowCam a safe distance above the bottom and away from a cliff, but at a distance that is also optimal for the high-definition digital still cameras carried by the instrument. The forward-looking altimeter means that TowCam can be safely flown over areas of rough topography or over steep slopes.
Today, TowCam’s abilities were put to the test as the instrument flew an east-west transect from the abyssal plain up the steep slope of the continental shelf near Hydrate Ridge, for a total elevation gain of 800 meters, or 2400 feet. The purpose of this transect was provide preliminary information about one of the more difficult paths that the regional observatory’s submarine cables will have to follow as they are deployed to link the nodes across the plate.
Challenges
TowCam Engineer Erich Horgan, Dan Fornari’s second in command, described the challenges of avoiding a collision with the bottom or the slope in such a transect. The ship was traveling at .33 knots, there were 2611 meters of attached wire out, the vehicle was 3.5 meters off the bottom, and the slope was 2 meters in front. For one hour of intense concentration, TowCam was flown up the slope taking photographs of the bottom of the cliff face as it went.
The atmosphere in the control center for TowCam is intense and very focused during such operations. Based in the ship’s computer lab, the TowCam operator controls the winch on deck that feeds the wire in and out to the instrument, and makes adjustments to respond to slope and bottom changes. Using a contour map from the earlier EM300 survey of the slope, another team member works to plot the ship’s position and estimates TowCam’s position at the end of the wire that is being constantly pulled by the ship. One of the important jobs of the plotter is to help the TowCam operator anticipate what’s coming up on the steep slope. The operator also calls out depth and other readings every five minutes to the data entry team member sitting at a computer. This information will be crucial later when the TowCam photographs are keyed to precise seafloor location.
Erich, who is new to TowCam but has been operating other types of towed systems in the oceans for 16 years, explains that the key to success is to constantly anticipate what’s coming up; nothing happens immediately between an action at the winch by the operator and the response by TowCam some 2600 meters away at the end of the wire on the bottom of the ocean.
The results of this flight will be featured in tomorrow’s piece on cliffs and vents!
Contributed by Chief Scientist John Delaney